HELLO Everyone.!

Introduction:





>>Female to Female Pin Connector Wire
Step -7: Binding Transmitter and Receiver
Step -8: Calibrate your Remote control using PC software.
Install CD into your Computer(Comes with your remote control)
The flight controller comes with an LCD screen and 4 buttons to feed some values and configuration or settings
Go According to these videos. Dont forget to "Factory Reset" while Getting started initially..:)
Have you ever thought of Drones that fly in the sky with remote controls in your hands performing various activities and now you have decided to make your own? Then there is my blog to help you out in Getting started with drones to make your own drone in a cheaper and super easy way. This might help you in school/College.
Introduction:
What are they and who uses them? Some call them drones, and some apply the label “quadcopters”, though they can have any number of rotors or even be planes— Also called “unmanned aerial vehicles” (UAVs).
UAVs are and aren't new. A new trend emerged in the tech toy and aerial imaging market an explosion in popularity of compact multi-rotor RC aircraft, perhaps most notably the DJI Phantom 3 (a company that manufactures drones or similar), a compact quadcopter capable of flying a GoPro either statically mounted or stabilized with a 2-axis gimbal, equipping them with cameras. Such technology can have many applications as a hobbyist and as a professional.
So Why not build our own at cheaper rates..:) and learn something new as well!
Look out at the video first, how it looks!
So let's get to understanding the drones ("quadcopter" in my case) and then I will tell you how to make your own drone including each and every step I used to build my first drone with successful flight.
So Why not build our own at cheaper rates..:) and learn something new as well!
Look out at the video first, how it looks!
So let's get to understanding the drones ("quadcopter" in my case) and then I will tell you how to make your own drone including each and every step I used to build my first drone with successful flight.
Step -1: Know you're quadcopter-How they Work
UVAs break into seven key components:
- Main Controller (MC) /Flight Controller:-
The heart of the flight-control system can be thought of as the “brains” of the UAV. It is an embedded computer that has custom software for controlling the aircraft, sometimes user-reprogrammable. In some designs, the MC is a separate module with connection ports. On others, especially consumer products, a single PCB (circuit board) may include the MC, gyros/sensors, ESCs, and other core flight electronics.
I used the KK2.1.5 Version of the flight control board. They are pretty compact and built-in gyros, Hence preferred.
- Gyros or Sensors:-
For autonomy to work, the Main Controller MC needs to track how the aircraft is flying. To accomplish this, some form of the sensor array is provided. Generally, it will include accelerometers, IMUs (inertial measurement units), and gyros, and may also work in conjunction with positional data from an optical flow system or GPS/compass. Basically, these sensors tell the UAV how fast its acceleration is changing, in what direction, and whether it is right-side up. Those familiar with motorized gimbal camera stabilizers may recognize the same sensor technology being employed here as in gimbals.
- Electronic Speed Controllers (ESCs):-
Each motor has an ESC. In its most basic form, an ESC regulates power going to the motor with which it is paired. More sophisticated systems can also relay data back to the MC, such as vitals about how the motors are performing. With six or more rotors, active feedback makes it possible to keep flying if one motor fails.
- Receivers:-
This receiver is for the radio control system. It pairs (“binds”) with the controller the pilot or operator holds, which logically, if confusingly, is known as the “transmitter.” Modern receivers typically operate in the 2.4GHz range (like other license-free radio systems such as Wi-Fi) and have four or more channels, extra channels enabling custom functionality to be relayed via the control signal, in addition to basic piloting inputs. In the hobby world, these extra channels might be used for anything from retracting/extending landing gear to firing off a smoke generator. In aerial imaging applications, the extra channels can sometimes be dedicated to gimbal/camera control.
- Motors:-
In most cases, these are brushless electric motors. The motors are usually paired, each pair a set containing one clockwise (CW) motor partnered with one counterclockwise (CCW) rotating motor, though they may be sold individually. It is important when replacing them or building your own system to use the correct rotational direction in the correct position. This can get confusing, as the propellers are often designated CW or CCW based on which way they screw on, not which way they rotate—which is probably the opposite direction!. Motors are BLDC types.
- Propellers:-
Light UAVs use plastic propellers, which resist breaking on impact because they are flexible, and they are safer. Heaver models use carbon fiber or other more rigid materials. Carbon fiber propellers are dangerous, even deadly, and should be used only by experienced pilots and well away from people. Unless extreme performance is a concern, the benefits of carbon fiber over plastic are marginal on multi-rotors.
- Transmitter:-
This is the radio controller. UAVs equipped with receivers can work with a range of transmitters. This allows the user to select the best fit, depending on what features they are looking for and what their budget might be. Systems that include a transmitter (as well as other basic accessories required for flying) are dubbed “ready-to-fly,” and are the simplest to jumpstart the beginner. When investing in a transmitter, generally, compatibility can be determined by referring to the specs for the receiver. It will need to support the same protocol as the receiver and support at least as many channels as the receiver requires.
So, for example, a 4-channel receiver will work happily with a 6-channel transmitter. Simple!
>>I used Fly Sky CT6B- 6 channel radio control.
So I think its enough to understand our drone with quite a brief introduction and now its time to move to our DIY section..:)
>>I used Fly Sky CT6B- 6 channel radio control.
So I think its enough to understand our drone with quite a brief introduction and now its time to move to our DIY section..:)
Step -2: Parts You Need-
- Frame
-->>I built my own frame using an aluminum bar and acrylic glass plate.
-->>You can build the same or buy from the market. - Motor x4
-->> Motor rating 1000KV - Electronic Speed Control (ESC) x4
-->>30A - Flight Control Board
-->>KK2.1.5 - Radio transmitter and receiver
-->>CT6B 6 Channel - Propeller x4 (2 clockwise and 2 counter-clockwise)
-->>10 inches - Battery & Charger
-->>11.1v, 3300 mah
>>Female to Female Pin Connector Wire

Step -3: Frame construction
The frame is made by using aluminum bars as shown in the figure and for the base I used acrylic glass.



Refer to figures and photos. The frame should be such that the arm of the drone is compatible with the propellers and the mid base for the drone should not be over the base area, this will affect the thrust produced by the motor.
The thing to build frame>>
- Aluminium Bars
- Acrylic glass/plate
- Bolts and nuts
- Steel washer
- Rubber washer
Other tools>>
- Drill machine
- Hot Glue Gun
- Screwdriver
The Frame can be made into two configurations that are X-configuration and + configuration.
In this quadcopter, I used X-configuration.
Other tools>>
The Frame can be made into two configurations that are X-configuration and + configuration.
In this quadcopter, I used X-configuration.
Step -4: Assembling part


Now we have our frame for the drone and the next step is to mount all the necessary parts on the frame.
Use screwdrivers to tighten the motors on the frame as shown in the figure.
>>Mount all 4 ESCs on the arm of the frame with the help of hot glue and zip ties.
>>Connect the Bullet connectors with the motors.
>>Since we have made our own frame, so we need to make our own power distribution system.
>> I attach all ESCs below the arm. You can glue them over the frame. This thing does not matter.
Now let's move to make power Distribution for our drone.
Step -5: Power Distribution part

All ESCs come with a connector to connect to the battery. But here we can do two things--
- Buy and connect all the connectors with the necessary male and female connectors, but this will increase the cost as well as increase the overall weight
Or (alternate way)
- Desolder all the connectors and Solder a jumper wire from all ESC in parallel and finally add a single Male connector instead of four as shown in the figure, to connect it with a battery.
I used 2nd method. Desolder all the male connectors from all the ESCs and connect two single wires for both Positive and Negative wires in parallel. Finally, connect a male connector that can connect to a battery.
The figure illustrates more than a theory so let's have a look at all pictures..;)
Or (alternate way)
I used 2nd method. Desolder all the male connectors from all the ESCs and connect two single wires for both Positive and Negative wires in parallel. Finally, connect a male connector that can connect to a battery.
The figure illustrates more than a theory so let's have a look at all pictures..;)
Step -6: Mount the Flight controller and Receiver


The flight controller is connected with the help of a female connecting wire as shown.
you can see the video in order to how to connect the Motor and ESCs with the flight controller Flight control is labeled with the connection and pin to connect like output1,out2,out3,out4,out5,out6,out7,out8.
They connect to our four motors which are female wires on ESCs (red, black, yellow).
Step -7: Binding Transmitter and Receiver
We will receive a binding Cable with a remote that includes all accessories like Software CD, PC cable, etc.
>>Plug the binding cable into a pin labeled with "bind" on the receiver.
>>Supply Power to Receiver using flight controller(connection with FC [fight controller] and receiver will automatically receive power, NO extra connection required)
To bind your transmitter and receiver do the following steps>
- Put the battery into the remote (DO NOT ON the switch)
- Connect the battery to the Drone
- Now Press a BIND button(somewhere around the bottom left of the remote) on the remote and switch ON the remote
- The red LED on the receiver comes in the stable Mode (before it was blinking)
You are Done with Binding Process..:) now let's calibrate!
>>Plug the binding cable into a pin labeled with "bind" on the receiver.
>>Supply Power to Receiver using flight controller(connection with FC [fight controller] and receiver will automatically receive power, NO extra connection required)
To bind your transmitter and receiver do the following steps>
You are Done with Binding Process..:) now let's calibrate!
Step -8: Calibrate your Remote control using PC software.

Install CD into your Computer(Comes with your remote control)
The software is so-called "T6 Config" and a window will appear like the photo I attached
Use the following link to change the settings
You can Watch callibration video.
Use the trim button to remove the black area from each channel.
Once you have done all these steps you are ready for your first move.
Step -9: Initial setup of Flight Controller


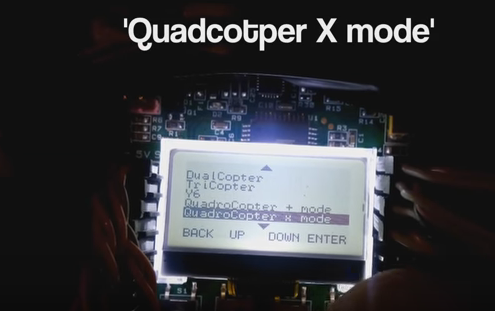





We have to do some changes to the Flight controller.
The flight controller comes with an LCD screen and 4 buttons to feed some values and configuration or settings
Here is the Video of such settings.
Initial setup KK2.1.5
Go According to these videos. Dont forget to "Factory Reset" while Getting started initially..:)
After entering all the values and setting up into FC. It's time to check out a motor rotation and Offcourse first Lifting.
Use a remote to ARM your drone in order to fly. This is a must for every remote control and flight control, without this, your drone will not move or work. Armed means Action time.;)
Step 10: Fun time-First Flight


Now you are Ready to Fly.
Make sure you are with enough space to fly or else you may need to make another..;)
While Testing you may destroy propellers (same here) but you can change them anytime and get ready again.
Refer to my videos of First Flight and Success Flight.
Video 1: Drone Testing and first flight

Feel free to contact me if you face any problems. I will get back to you with Solutions from Experts.
And you are Done.:)
Hope it Helped you a lot.
Please share If u think helpful. Also, you can support me. Stay making and keep learning.:D
I will meet you in my next blog.:D
Make sure you are with enough space to fly or else you may need to make another..;)
While Testing you may destroy propellers (same here) but you can change them anytime and get ready again.
Refer to my videos of First Flight and Success Flight.
Video 1: Drone Testing and first flight
And you are Done.:)
Hope it Helped you a lot.
Please share If u think helpful. Also, you can support me. Stay making and keep learning.:D
I will meet you in my next blog.:D




{kind=link}
{kind=link}